Adatok
ZsoleszFPV
98 bejegyzést írt és 49 hozzászólása volt az általa látogatott blogokban.
Erről a témáról már többször írtam és említettem, hogy az egész quad témának az egyik legképlékenyebb területe. Sokat olvastam utána, de teljesen nem értettem meg egészen addig, amikor is először végigcsináltam saját magma nulláról a gépem tuningolását. Akkor már sok…..
ZsoleszFPV
2015.10.10 15:28:55
@Atis P.: Szóval sorban: 1. Hamarosan posztolom majd, mire jutottam a PID-ekkel. Most még nem tökéletes a dolog, de sokkal jobb, mint volt. 2. Az alacsony érték a gyári alapbeállításoknál jóval alacsonyabbat jelent. P esetén mondjuk 2 alatt, I esetén 0.15 alatt, D esetén 5 alatt (yaw-nál D inkább 0, vagy 1). 3. Az Attitude PID-ekkel is érdemes játszani, ha Attitude módban akarsz repülni. Viszont a CelanFlight nem erre van kihegyezve és nem is tudom pontosan, hogy hogy kezeli a paraméterekt. Például a CC3D esetén voltak "Inner" és "Outer" PID-ek. Rat-ben csak az Inner számított, viszont Attitudeban hozzáadódott az Outer is. Szóval, ezt nem tudom. Hiszen az FPV versenyzéshez úgy is Rate/Acro mód kell, szóval az Angle/Attitudenak csak az első egy-két hétbn van jelentősége. Arra meg jók az alapbeállítások.
ZsoleszFPV
2017.02.01 12:25:21
@krisztianfz6: Nem a Naze32 a lényeg, hanem, hogy milyen szoftver (firmware) fut rajta? CelanFlight/BetaFlight/BaseFlight? Az igaz mondjuk, hogy a Te kérdésednél a válasz elég hasonló minden esetben.
A másik kérdés, hogy melyik tengelye körül forduljon el gyorsabban? Mert ugye 3 van a drágának. :)
Próbálok erre is univerzális választ adni:
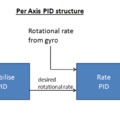
A forgási sebesség a "Rate" értéktől függ. Tengelytől függően van Roll, Pitch és Yaw rate. (Szerintem a Te kérdésed a Yaw-ra vonatkozik). A Rate érték növelésével tudod emelni az adott tengely maximális forgási sebességét.
A sebességet még befolyásolja az Expo. Hiába van ugyanis egy magas Rate, ha erős Expo van és az irányítókart csak kicsit mozgatod el, akkor relatív lassan fog fordulni a gép. (A kar teljes kitérésekor viszont mindig a maxmiális beállított Rate érték érvényesül).
A pozíció tartás a PID -ek közül az I érték kezeli. Tehát amelyik tengelyen úgy érzed, hogy elmozdul, ott emeld némileg az I értéket.
Viszont előtte ellenőrizd le, hogy távirányítódról biztosan pontosan középértéket (1500 us) kap-e a vezérlő! Mert, ha a távod pontatlan és mondjuk 1490-et küld középállásban, akkor csinálhatsz akármit az I-vel, mindenképpen lassan, de biztosan forogni fog, hiszen ezt a parancsot kapja a távirányítótól.
A másik kérdés, hogy melyik tengelye körül forduljon el gyorsabban? Mert ugye 3 van a drágának. :)
Próbálok erre is univerzális választ adni:
A forgási sebesség a "Rate" értéktől függ. Tengelytől függően van Roll, Pitch és Yaw rate. (Szerintem a Te kérdésed a Yaw-ra vonatkozik). A Rate érték növelésével tudod emelni az adott tengely maximális forgási sebességét.
A sebességet még befolyásolja az Expo. Hiába van ugyanis egy magas Rate, ha erős Expo van és az irányítókart csak kicsit mozgatod el, akkor relatív lassan fog fordulni a gép. (A kar teljes kitérésekor viszont mindig a maxmiális beállított Rate érték érvényesül).
A pozíció tartás a PID -ek közül az I érték kezeli. Tehát amelyik tengelyen úgy érzed, hogy elmozdul, ott emeld némileg az I értéket.
Viszont előtte ellenőrizd le, hogy távirányítódról biztosan pontosan középértéket (1500 us) kap-e a vezérlő! Mert, ha a távod pontatlan és mondjuk 1490-et küld középállásban, akkor csinálhatsz akármit az I-vel, mindenképpen lassan, de biztosan forogni fog, hiszen ezt a parancsot kapja a távirányítótól.
ZsoleszFPV
2017.09.05 21:36:49
@DOGMAN: Szia! Amit leírsz, az teljesen normális viselkedés, Ha megdöntöd a koptert bármelyik irányba, akkor a motorok felhajtó-erejének egy része az oldal irányba mozgásra fog elmenni, így kevesebb erő marad az emelésre. Ezért a gép elkezd süllyedni. Ezt Neked kell kompenzálni. Ha bármely irányba megdöntöd a gépet, akkor több gázt kell adni. Minél jobban megdöntöd, annál több gázt. Ha pedig visszaáll semleges pozícióba, akkor el kell venni némi gázt. Ezt hívják gáz-menedzsmentnek és ez egy alapvető technika, amit elsőként kell megtanulni mindenkinek. A jó hír, hogy megtanulni könnyű, de a mesterévé vállni nagyon sok gyakorlást igényel. :)
Miután elkészült és felszállt a quadunk, a legnagyobb feladat, hogy a repülésvezérlőn megtegyük azokat az egyedi beállításokat, amelyek ahhoz kellenek, hogy a gépünk irányítása pontos, direkt legyen, pontosan kanyarodjon, ne legyenek kellemetlen rezgések, beremegések, stb.
Mivel…..
ZsoleszFPV
2016.12.08 15:47:39
@Jan Turi Nagy: Szia! Sajnos GPS-es rendszerrel nem dolgoztam, nem is tervezem. Az inkább a kamera-platformokhoz való, nem a versenygépekhez. Ezért erre a kérdésedre nem tudok válaszolni.
ZsoleszFPV
2017.08.11 10:18:44
@Jan Turi Nagy: Szia! Még létezik Cleanflight??? :) De komolyan. Ha GPS módban akarsz repülni, akkor iNAV szoftvert javaslok, ha pedig kis versenygéppel, akkor BetaFlight-ot.
GPS-szel és Barométerrel továbbra sincs tapasztalatom, de feltételezem, hogy a GPS, illetve stabilizált mód esetén nem az "Acro" PID-eket, hanem a "Level" PID-eket használja, ezért azokon lehet érdemes tekergetni. Valamint van egy halom CLI paraméter ami GPS és Baro dlogokra vonatkozik, amelyeket én soha nem használtam, így sajnos nem tudok ebben segíteni Neked.
GPS-szel és Barométerrel továbbra sincs tapasztalatom, de feltételezem, hogy a GPS, illetve stabilizált mód esetén nem az "Acro" PID-eket, hanem a "Level" PID-eket használja, ezért azokon lehet érdemes tekergetni. Valamint van egy halom CLI paraméter ami GPS és Baro dlogokra vonatkozik, amelyeket én soha nem használtam, így sajnos nem tudok ebben segíteni Neked.

A váz értelemszerűen a quadcopter alapvető eleme. Erre kerül fel-, illetve beszerelésre az összes többi alkatrész, elektronika. Ez határozza meg a gép méretét is.
Klasszikus repülőmodellekkel ellentétben multikopter építésnél nem igazán számítanak az aerodinamikai…..
ZsoleszFPV
2017.03.28 19:55:12
@pabiyubi: Szia! Ha jól értem, minden O.K., de a gép nem ARM-ol. Hogy van állítva az ARM? Kapcsolóra, vagy joystick-re? Ha kapcsolóra, akkor Configurator Modes fülén, amikor ARM állásba billented a kapcsolót, kizöldül az ARM felirat? A gáz csatorna végpontjai jól be vannak állítva? Lemegy 1000-ig?
Ha joystick-kel ARM-olnál, akkor a gáz és a yaw csatorna be van állítva, lemennek 1000-ig alsó állásban? Ha ezek nem stimmelnek, akkor a FlySky távodon be kell állítanod a csatornavégpontokat, amíg lehetőleg minden csatorna 1000-től 2000-ig megy és 1500-nál van a középállás.
Ha ennél bonyolultabb a hiba, akkor még az lehet, hogy a konfigurátor alsó, státusz sorában a CPU% kijelzés magas érték (30%-nál stabilan magasabb). Ez esetben a PID loop frekvenciáját kell lejebb venni 2, vagy akár 1 KHz-re.
Egyébként javaslom, hogy az ESC-ket amilyen gyorsan csak lehet flasheld át BLHelire.
Ha joystick-kel ARM-olnál, akkor a gáz és a yaw csatorna be van állítva, lemennek 1000-ig alsó állásban? Ha ezek nem stimmelnek, akkor a FlySky távodon be kell állítanod a csatornavégpontokat, amíg lehetőleg minden csatorna 1000-től 2000-ig megy és 1500-nál van a középállás.
Ha ennél bonyolultabb a hiba, akkor még az lehet, hogy a konfigurátor alsó, státusz sorában a CPU% kijelzés magas érték (30%-nál stabilan magasabb). Ez esetben a PID loop frekvenciáját kell lejebb venni 2, vagy akár 1 KHz-re.
Egyébként javaslom, hogy az ESC-ket amilyen gyorsan csak lehet flasheld át BLHelire.

Az utolsó téma amivel a legutóbbi átépítése óta adós vagyok, az új OSD (Gy.k.: OSD=On Screen Display = képernyőn megjelenített kijelző) telepítése. Praktikus okokból ezt két részre szedem. Ebben az első részben az áttekintés és a firmware telepítése lesz a téma, a…..
ZsoleszFPV
2016.04.25 23:02:05
@Krisztián Ambrus: Az az ESC-től is függ. Nyilván csak olyan jöhet szóba, amin van bootloader (tehát a szervocsatlakozón keresztül programozod). Silabs chipeseket egy kis kiegészítővel lehet (ezt már próbáltam). Atmelest nem tudom, még nem próbáltam, de van rá esély. Az Arudinot viszont ez az FTDI nem helyettesíti. De egyébként ilyen FTDI sokmindenhez kellhet (MinimOSD, Flight Controller), tehát érdemes egyet beszerezni pár dollárért.
ZsoleszFPV
2016.05.07 21:52:04
@vzol343: A LiberPilotot abszolút nem ismerem. De az elődjéhez, az OpenPilothoz volt szerencsém. Úgy tudom, az általam fent leírt MW-OSD (Scarab OSD) firmware nem támogatta azt a szoftvert. Létezett viszont egy olyan Firmware a MinimOSD-hez, amit kimonodttan az OpenPilothoz írtak. Hogy ezt vajon továbbvitték-e a LibrePilot felé, illetve, hogy esetleg alapból kompatibilis-e vele, azt nem tudom. Keress rá a neten! Sajnos többet most én sem tudok róla mondani.
ZsoleszFPV
2017.02.14 15:27:30
@szabyc3: Ránézésre jónak tűnik, de a képekről nem látom potnosan, hogy mi a hibajelenség.
1. Ha csak a "hangyák háborúja" jelenik meg a monitoron, akkor a VTx nem kap semmi jelet, azaz valahol a MinimOSD-nél van a hiba.
2. Ha fekete kép van a monitoron, akkor az OSD jó, de a kamerától nem megy el a jel az OSD-be.
3. Ha pedig van kép, csak a "No Signal" felirat villog, akkor az FC és az OSD közötti UART kommunikációval van gond.
A kamera egyébként bírja a 12V-ot? Vannak csak 5V-ot kamerák is.
Az OSD úgy látom kap 5V-ot az FC-ről, hiszen villognak a LED-ek, de azért erre is érdemes lehet rámérni.
Egyébként pedig a fenti 1-3 pont alapján a gyanús vezetékeket, forrasztásokat érdemes átnézni. Nincs-e véletlenül egy szakadás, vagy rövidzár valahol. Elsőre ennyi ötletem van.
1. Ha csak a "hangyák háborúja" jelenik meg a monitoron, akkor a VTx nem kap semmi jelet, azaz valahol a MinimOSD-nél van a hiba.
2. Ha fekete kép van a monitoron, akkor az OSD jó, de a kamerától nem megy el a jel az OSD-be.
3. Ha pedig van kép, csak a "No Signal" felirat villog, akkor az FC és az OSD közötti UART kommunikációval van gond.
A kamera egyébként bírja a 12V-ot? Vannak csak 5V-ot kamerák is.
Az OSD úgy látom kap 5V-ot az FC-ről, hiszen villognak a LED-ek, de azért erre is érdemes lehet rámérni.
Egyébként pedig a fenti 1-3 pont alapján a gyanús vezetékeket, forrasztásokat érdemes átnézni. Nincs-e véletlenül egy szakadás, vagy rövidzár valahol. Elsőre ennyi ötletem van.

Az utóbbi időben rengeteg fejlesztés történt az ESC-k szoftverei területén. (akinek az ESC kifejezés nem mond semmit, előbb olvassa el ezt). Elterjedőben van a OneShot125 kommunikációs szabvány és lehetőség van az active braking alkalmazására is. (Ezekről talán majd egy külön…..
ZsoleszFPV
2016.01.22 02:22:22
@cselloman: Először is. Minek bajlódsz SimonK-val? BLHelit tegyél fel. A BLHeli Suite nagyságrendekkel kényelmesebben kezelhető, mint a RapidFlash. Ha szerencséd van, felismeri az ESC-idet, ha nem, akkor van egy elég jó dokumentáció, amiből ki tudod választani, hogy konkrétan a Te ESC-idre melyik firmware való.
A BLHeli Suite-ban az Atmel, SK Bootloader és Afro USBLinker kombinációt válaszd! A csatlakoztatás ugyanúgy megy, mint ahogy a RapidFlashnél próbáltad. Korábban itt leírtam, hogy megy ez: zsoleszfpv.blog.hu/2015/08/19/blheli_csakazert_is
Most 14.3 a legfrissebb BLheli, azt tedd fel!
A BLHeli Suite-ban az Atmel, SK Bootloader és Afro USBLinker kombinációt válaszd! A csatlakoztatás ugyanúgy megy, mint ahogy a RapidFlashnél próbáltad. Korábban itt leírtam, hogy megy ez: zsoleszfpv.blog.hu/2015/08/19/blheli_csakazert_is
Most 14.3 a legfrissebb BLheli, azt tedd fel!
ZsoleszFPV
2016.11.26 21:09:40
@RendszergazdaNyh: Ebből a leírásból nem sok derül ki erről az ESC-ről. Az, hogy van benne BEC, nekem azt súgja, hogy valószínűleg ATmel procis. De nem lehet tudni, hogy milyen Firmware van rajta (talán SimonK) és hogy van-e egyáltalán bootloader rajta... Arduino nano-val biztosan lehet rá akár még bootloadert is flashelni, persze ahhoz ki kell bontani és közvetlenül a rajta lévő MOSI, MISO és hasonló portokhoz csatlakozni. Ugorj rá a google-re, talán találsz megoldást.
Ha szerencséd van és valamilyen bootloader már van rajta, akkor BLHeli suite-tal tudsz hozzá csatlakozni, csak a megfelelő linker kell (Turnigy, vagy Afro USB linker például jó, ha tényleg Atmel chipes). A Linkert is ki tudod talán váltalni Nanoval.
Ha szerencséd van és valamilyen bootloader már van rajta, akkor BLHeli suite-tal tudsz hozzá csatlakozni, csak a megfelelő linker kell (Turnigy, vagy Afro USB linker például jó, ha tényleg Atmel chipes). A Linkert is ki tudod talán váltalni Nanoval.
ZsoleszFPV
2016.11.26 21:34:09
@RendszergazdaNyh: Az USB Linker amit linkeltél BLHeli firmware-re hivatkozik, ami ugye azért hülyeség, mert nem az a lényeg, hanem a chip (esetedben ATmega), illetve a bootloader. De, ha a pongyola megfogalmazást értelmezni próbálom, akkor valószínűleg az a Silabs chipes ESC-khez jó, a tiéd pedig ATMega. Ahhoz más linker kell. Ha akármilyen bootloader van rajta, akkor a megfelelő adapterrel tudod BLHeli Suite segítségével flashelni 1-vezetékes módszerrel, szervó-csatlakozón keresztül. Ha nincs bootloader, akkor maradnak a chip lábai, vagy a kuka.
U.I.: Feltételezem, hogy amikor csatlakozni próbálsz, akkor adsz tápot az ESC-nek, ugye? Valamint a szervó csatiból a plusz szálat ki szokták húzni.
U.I.: Feltételezem, hogy amikor csatlakozni próbálsz, akkor adsz tápot az ESC-nek, ugye? Valamint a szervó csatiból a plusz szálat ki szokták húzni.
Aki rendszeresen követi a blogom, az gondolom azért teszi, mert igyekszem (vagy legalább is igyekeztem) a leggyakoribb témákat összegezni és kérdéseket megválaszolni. Ezt én is csak azért tudom megtenni, mert több különböző forrásból utánaolvasok a dolgoknak.
Most, hogy nem igazán van időm aktívan…..
ZsoleszFPV
2016.09.23 13:08:39
@rockjano: Karácsonyig sajnos még biztosan nagyon sok egyéb dolgom van, bár a hosszú, őszi-téli esték azért lehet, hogy adnak majd lehetősgéet írásra. A kihívás azonban nem is az írás, hanem az információk összeszedése, ami nagyon időigényes feladat. Ez az amire most nincs időm. :(

A sok megnézett videó és elolvasott oldal alapján már a kezdetektől terveztem, hogy a gépet felszerelem egy csipogóval, amely segít megtalálni, ha leesik a magas fűben, vagy erdőben. Akkor még csak úgy gondoltam, hogy ez amolyan úri huncutság, de most az első repülések után már…..
ZsoleszFPV
2016.05.18 08:12:50
@Kósa Roland: Nem a vevőre szoktuk a csipogót rakni, hanem a repülésvezérlőre (FC). A legtöbb ma kapható vezérlőnek van kimondottan csipogó csatlakoztatására szolgáló pontja, tüskéje, stb. Ezekre sima 5V-os csipogót kell kötni. Létetik olyan megoldás, hogy a vezérlő-szoftver PPM passthrough funkcióját kihaszhnálva egy csipogót a vezérlő PWM kimenetére teszünk, amelyre direktben átvezetjük az egyik AUX jelet. Ilyenkor viszont olyan csipogó kell amely PWM jel alapján működik. Ma ezt már nem nagyon használjuk, mert az első megoldás tökéletesen kiváltja ezt, jóval egyszerűbb módon.

Az elmúlt pár hónapban annyi újdonság jelent meg a piacon, hogy követni is nehéz. Eredetileg azt gondoltam, hogy mindegyikről írok kicsit részletesebben, de abból olyan hosszú cikk lenne, hogy senki nem olvasná el. Ezért most maradjunk egy inkább csak a repülésvezérlőknél, azokból is egy rövid…..
ZsoleszFPV
2016.05.15 21:17:08
@Krisztián Ambrus: Ne izgulj, az már tudja. A v2.1-es verzióra már kijavították az összes kezdeti hibát, szóval egy nagyon jó kis vezérlő, ha sikerült raktáron találni. :)

A bejegyzés első részében a Walkera Runner 250-esről, illetve a Storm Racing Drone 280-ról volt szó. Ha lemaradták, klikk ide. Ott folytatom, ahol abbahagytam. Jöjjön a harmadik versenyző!
ImmersionRC Vortex
Először is kezdem az elején azzal, hogy a Vortex egy kakukktojás, mert nem…..
ZsoleszFPV
2016.05.08 23:35:34
@lgazso: Rögtön kezdem azzal, hogy csak hallomásól ismerem az Eachine Racert, illetve a Radiolink távot is. De komplett, kész Racerben én személyesen kettőt merek ajánlani: ImmersionRC Vortex 250 Pro, illetve TBS Vendetta. Mindkettő profi gép, amiben a legjob alkatrészek vannak benne. Hidd el nekem, hogy inkább egy 100 ezres gépet vernék állandóan földhöz, mert az bírja! A kínai cuccok biztos, hogy törni fognak, mint a ropi és a végén több időt töltesz szereléssel, mint repüléssel.
Az én javaslatom attól függ, hogy mennyire gondolod komolyan ezt az FPV dolgot.
1. Ha még nem döntötted el, de tetszik és ki szeretnéd próbálni és most nem akarsz 500+ dollárt kiadni egy "profi" gépre, akkor azt javaslom, hogy vegyél valakitől egy használt, épített racert, amivel egyből tudsz repülni és ki tudod próbálni ezt az egész dolgot. Ha bejön, akkor úgy is építeni fogsz majd magadnak egy olyan gépet, amilyet akarsz és a pénztrácád megenged.
2. Ha már most úgy érzed, hogy komolyan gondolod, akkor vagy a fent javasolt két profi gépből vegyél egyet, vagy pedig akár állj neki építeni magad egyet. Ez utóbbi dolog elég sok utánaolvasást és tanulást igényel, de szerintem megéri.
Javaslom, hogy látogasd meg ezt a forumot: http://forum.rcmodell.hu/showthread.php?35670-Mini-(-250mm)-FPV-Quadcopter-az-új-divat
Illetve ezt a Facebook oldalt: www.facebook.com/fpvracehungary/
Itt további tanácsokat kaphatsz és akár eladó gépet is találsz.
Az én javaslatom attól függ, hogy mennyire gondolod komolyan ezt az FPV dolgot.
1. Ha még nem döntötted el, de tetszik és ki szeretnéd próbálni és most nem akarsz 500+ dollárt kiadni egy "profi" gépre, akkor azt javaslom, hogy vegyél valakitől egy használt, épített racert, amivel egyből tudsz repülni és ki tudod próbálni ezt az egész dolgot. Ha bejön, akkor úgy is építeni fogsz majd magadnak egy olyan gépet, amilyet akarsz és a pénztrácád megenged.
2. Ha már most úgy érzed, hogy komolyan gondolod, akkor vagy a fent javasolt két profi gépből vegyél egyet, vagy pedig akár állj neki építeni magad egyet. Ez utóbbi dolog elég sok utánaolvasást és tanulást igényel, de szerintem megéri.
Javaslom, hogy látogasd meg ezt a forumot: http://forum.rcmodell.hu/showthread.php?35670-Mini-(-250mm)-FPV-Quadcopter-az-új-divat
Illetve ezt a Facebook oldalt: www.facebook.com/fpvracehungary/
Itt további tanácsokat kaphatsz és akár eladó gépet is találsz.
ZsoleszFPV
2016.05.12 12:15:35
Keress a neten európai szállítókat! Elég sok shop van Angliában, Németországban és Hollandiában is. A Banggood alapból mindig Kínából szállít. Ha kiválasztasz egy terméket van egy "Shipping from" mező, ahol alapból CN Direct van. Ha emellett látsz EU Direktet is, akkor ott tudsz EU raktárt választani. Vagy egyből menj a eu.banggood.com/ oldalra és ott keress! Sajnos elég kevés dolog van itt az EU-ban. Ugyanez igaz a Hobbykingre is, ahol szintén van EU és UK raktár is. Sajnos szintén nincs nagyon tele. :(
Ezeknél a (kis) tételeknél nincs VÁM, csak ÁFA, illetve a posta felszámol pár ezer forint vám-ügyintézési díjat. Ez akkor igaz, ha a termék értéke meghaladja a 20 EUR-t. Ha alatta van, akkor nem számolnak fel semmit.
Ezeknél a (kis) tételeknél nincs VÁM, csak ÁFA, illetve a posta felszámol pár ezer forint vám-ügyintézési díjat. Ez akkor igaz, ha a termék értéke meghaladja a 20 EUR-t. Ha alatta van, akkor nem számolnak fel semmit.

MW OSD konfiugrálás
Ha az első lépéssel végeztünk és fent van az MWOSD firmware a MinimOSD modulonkon, akkor jöhet a konfiguráció.
Magát az OSD modult ugyanúgy az FTDI adapteren keresztül kell csatlakoztatnunk a számítógéphez, mint ahogy a firmware feltöltéséhez…..
ZsoleszFPV
2016.04.19 16:44:00
@Krisztián Ambrus: Ha az OSD önmagában működik, csak nem kommunikál a vezérlővel (CleanFlighttal), akkor középen a No Data felirat villog. Ha egyáltalán semmi nem látszik, akkor az a valószínűbb, hogy nem kap megfelelő tápot (GND és +5V az OSD), vagy esetleg teljesen hibás. Ilyenkor átengedi magán simán a videójelet, de nem rak rá semmit.
Mondjuk, ha sikerült flashelned, akkor nem hiszem hogy hibás. Inkább valami tápellátási gond lehet. Ellenőrzid a forrasztásokat és azt, hogy mindent a jó helyre kötöttél-e be.
Micro MinimOSD-ről beszélünk, vagy a "hagyományosról"? Mert ez utóbbinál még egy (két?) forrasztójumpert is össze kell kötni, ha mindkét felét egy 5V-os forrásról akarod táplálni.
Még esetleg az lehet, hogy a fontokat nem töltötted fel rendesen? Bár szerintem akkor is megjelenik valami, csak max. nem értelmezhető karakterek.
Mondjuk, ha sikerült flashelned, akkor nem hiszem hogy hibás. Inkább valami tápellátási gond lehet. Ellenőrzid a forrasztásokat és azt, hogy mindent a jó helyre kötöttél-e be.
Micro MinimOSD-ről beszélünk, vagy a "hagyományosról"? Mert ez utóbbinál még egy (két?) forrasztójumpert is össze kell kötni, ha mindkét felét egy 5V-os forrásról akarod táplálni.
Még esetleg az lehet, hogy a fontokat nem töltötted fel rendesen? Bár szerintem akkor is megjelenik valami, csak max. nem értelmezhető karakterek.
ZsoleszFPV
2016.04.19 17:30:26
@Krisztián Ambrus: Sajnálattal hallom. A Micro Minim nagy előnye a kis mérete, súlya, cserébe nem egyszerű dolgozni vele. Könnyen rövidre lehet zárni két forraszpontot és el is lehet nézni, hogy most melyikre kellene forrasztani a +5V-ot és melyikre a GND-t, vagy a jeleket. Én folyékony szigetelővel szoktam bevonni, amikor összerakom, így nem érhet hozzá elvileg semmihez az alja, vagy a teteje. Javítani viszont kicsit macerásabb így.

A pályaversenyes kudarc után úgy döntöttem, hogy olyat repülök, amit igazán élvezek. Ez nekem a Freestyle. Sokkal inkább ez jön be, mint leszúrt póznák között cikázni.
Végre az idő is kedvez a repülésnek, így az utóbbi napokban tudtam egy kicsit gyakorloni. Szombaton is kimentem a szeles idő…..
ZsoleszFPV
2016.04.19 16:45:12
@Jackal_: Egyelőre csak a gátat erősítik, ahogy láttam. Már elkedzték elhordani köveket a partra. A Sziget előkészületei majd csak július körül kezdődnek. Addig még jók vagyunk.
ZsoleszFPV
2016.04.19 16:48:25
@Tyron hun: Eredetileg ennek a térképnek a segítségével tévedtem a Hajógyári-szigetre is. A valóságban az ég világon semmilyen reptető nem volt ott, de közben már lassan kialakítjuk. A kihívás az, hogy Budapest belvárosából hova menjen az ember repülni, ha biztonságosan akarja azt tenni, de nem is akar egy órát utazni érte... :(

Ez most egy könnyedebb hangvételű bejegyzés lesz. Mostanában sokszor mosolygok magamban, hogy bár még csak nem egészen egy éve foglalkozom ezzel a hobbyval, mégis már több olyan "hullámot" láttam, ami jött, hirtelen mindenki rákattant, majd kb. ugyanilyen gyorsan kiderült, hogy ez nem vezet messze…..

Ez is megvolt. Hétvégén lebonyolításra került az első magyar multikopteres verseny, amely egyébként egy bajnoki sorozat első futama volt. Ezzel Magyarország, sok fejlettebb országot is megelőzve, felkerült a nemzetközi multirotoros versenvilág térképére.
Had kezdjem azzal, hogy LE A KALAPPAL,…..
ZsoleszFPV
2016.04.06 12:56:33
@Tyron hun: Köszönöm a kedves szavakat! Előbb-utóbb túllépek ezen a rossz élményen, hiszen már úton vannak a második géphez az alkatrészek. :) De a lényeg valóban az, hogy ez mennyire hobby, mennyire versenysport és mennyire akarja/tudja komolyan venni az ember ezt az egészet. Lehet, hogy jobb hobbi szinten megmaradni és saját örömünkre repkedni, elkerülve a felesleges stresszt, ami a versenyzésből szükségszerűen adódik.
ZsoleszFPV
2016.04.08 01:27:08
@Dóczi Gábor: Köszönöm az együttérzést! :) Már alakul a következő quad és a verseny utáni első repülés is megvolt. Szóval lesz folytatás. Amit nem írtam a depressziós hangvételű cikkben, hogy azért nagyon sok pozitív visszajelzést is kaptam Velencén a bloggal kapcsolatban, ami nagyon jól esett. Szóval jönnek még a cikkek, tippek és tanácsok.
ZsoleszFPV
2016.04.11 17:55:44
@ViX: Köszönöm a tippeket! A szervezők szerint a gyakorlásnál az ő készülékükben volt a hiba. A versenyfutamoknál elvileg már nem. De mivel tényleg nem volt lehetőség normálisan tesztelni a rendszert, ezért nem tudom biztosan.
Azóta kétszer repültem és most lett egy érintkezési hiba a kamera és a MinimOSD közötti csatlakozásnál. Felmerült bennem, hogy ez már esetleg a versenyen kezdett kialakulni? De azért azóta mentem 5-6 akksit gond nélkül.
Minden esetre a következő verseny előtt normálisan le akarom tesztelni ezt az adapteres videórendszert. Végső esetben akár azt is meg tudom oldani, hogy a kamerát az FC 5V-os regulátoráról táplálom. Csak pont az volt a lényeg, hogy ne kelljen mindent szanaszét forrasztani és alakítani, csak azért, mert 2-3 "hivatalos" versenyen is elindulnék.
A blogot fogom folytatni, talán kicsit ritkábban, de ennek semmi köze a versenyhez. Egyszerűen most kevés az időm rá. :(
Azóta kétszer repültem és most lett egy érintkezési hiba a kamera és a MinimOSD közötti csatlakozásnál. Felmerült bennem, hogy ez már esetleg a versenyen kezdett kialakulni? De azért azóta mentem 5-6 akksit gond nélkül.
Minden esetre a következő verseny előtt normálisan le akarom tesztelni ezt az adapteres videórendszert. Végső esetben akár azt is meg tudom oldani, hogy a kamerát az FC 5V-os regulátoráról táplálom. Csak pont az volt a lényeg, hogy ne kelljen mindent szanaszét forrasztani és alakítani, csak azért, mert 2-3 "hivatalos" versenyen is elindulnék.
A blogot fogom folytatni, talán kicsit ritkábban, de ennek semmi köze a versenyhez. Egyszerűen most kevés az időm rá. :(

FRISSÍTVE: 2016.04.08.: néhány aprósággal kiegészítve
Végre eljutottam addig, hogy legyen fél órám állítgatni az Emax Nighthawk Pro 280-amat és a DJI F330-amat. Aki esetleg nem tudná, a Flight controllerek szinte mindegyikét, amelyik komolyabb gépben található (a szénkefésekét persze nem) lehet…..
Ez a bejegyzés még talán pont időben jön azoknak, akik a videoadóval kapcsolatos műszaki paraméterek miatt nem döntötték még el, hogy indulnak-e a Drone Racing Hungary április 3.-i velencei futamán, de azért egy kisebb energia-befektetést hajlandóak lennének megtenni az ügy érdekében.
Előljáróban…..

Mostanában nem nagyon van időm a blogra írni, de ezt gyorsan meg szeretném osztani, hogy senki ne maradjon le róla.
Bár úgy sejtem, aki ezt a blogot olvassa, mostanra már mindenki tudja, hogy ezen a hétvégén kerül megrendezére a World Drone Prix Dubai 2016 verseny, ami egy jövőbeli World Drone Prix…..

Jó régen írtam már bejegyzést, részben idő hiányában, részben pedig azért, mert a borzalmas idő miatt nem igazán lehet repülni, így nem is történik olyna sok minden, azonkívül hogy egy-két hetente ugrok pár BetaFlight verziót.
Most találtam egy olyan témát, ami azt hiszem többeket - különösen még a…..
Korábban már írtam a BetaFlightról, amely jött, látott, győzött és néhány hónap alatt meghódította az FPV világot, többek között olyan funkcióknak köszönhetően, mint az Airmode.
Akik most jönnek ebbe a sportba és beleolvasnak a fórumokba, azt hihetik, hogy persze a BetaFlight firmware-t kell…..

Az FPV világban a legkedveltebb távirányító (rádió) megkérdőjelezhetetlenül az Frsky Taranis X9D (illetve annak a Plus változata).
Mostanában (2015 elején) azonban egy új EU szabályozás (CE Regulation V1.8.1) eléggé megkeverte a rendszert, ezért sokan futnak bele abba a problémába, hogy nem tudják…..

Ezzel a poszttal már nagyon régen adós vagyok, de egyéb elfoglaltságaim miatt nem jutottam hozzá. De egy tízórás repülőút tökéletesen alkalmas erre a célra. :)
Magát az Alien vázat korábban már itt részletesen bemutattam, úgyhogy itt most tényleg csak az építésre fogok fókuszálni
Az építés során…..
Zsolesz FPV
Az Acro repülési mód elsajátítása, egyszerűen, (nem csak) szimulátor segítségével
2016.01.05 15:10:44

Nem kérdés, hogy quadkoptert vezetni hatékonyan, igazán csak Acro/Rate/Manual módban lehet. Ez az a mód, amikor a gép csak azt csinálja, amire a pilóta a vezérlő karokon keresztül utasítja. Nem egyensúlyozza ki magát, nem önállósodik, csakis a stickek utasítsait követi. Ez ugye merőben eltér attól a…..

És kész....
Az utóbbi időben nem sokat írtam, mert azt a kis szabadidőmet, ami akadt azzal töltöttem, hogy megépítem a talán első magyarországi Alient.
Ma este elkészült a nagy mű és nem csak, hogy elégedett vagyok vele, de kifejezetten büszke vagyok rá. Nem volt hiábavaló az…..
ZsoleszFPV
2016.01.01 22:11:50
@Tyron hun: Igen, ez egy gyakori probléma, amióta az FrSky behozta ezt az EU verziózást. Kérlek olvasd át az RCModell Fórumon ezt a szálat, itt ezt többször tárgyalták már: forum.rcmodell.hu/showthread.php?26090-FrSky-Taranis-16-Channels-Full-Telemetry-RSSI
A lényeg, hogy a Taranisba épített belső XJT modul és a vevő firmware-ének egyeznie kell, EU vs. nem-EU tekintetben. A Te vevőd szinte biztosan non-EU, tehát vagy azt frissíted a vevőt EU firmware-re vagy a Taranis belső XJT modulját kell non-EU-ra átírni (ehhez pedig valószínűleg a Taranis firmware-ét is le kell cseérlni non-EU-ra). A vevő smart porton keresztüli firssítése csak OpenTX 2.1.x Tararnis firmware-rel megy (a gyári EU talán 2.0.92, vagy valami ilyesmi), ezért nem sikerült neked.
Én egyébként ez a kicsit bonyolultabb utat jártam: Taranis Firmware frissítés OpenTX 2.1.legújabb verzióra, majd annak segítségével már SD kártyáról a belső XJT modult is megflasheltem non-EU fimware-rel. Ez esetben a vevőhöz nem kell nyúlni. Viszont, ha a Taranisodon már vannak modellek bekonfigurálva, akkor azok konfigurációi nem fognak egy az egyben átmenni az új verzióra (főleg a Telemetria nem), ezért ezt is kalkuláld bele.
A CC3D-vel nem haszáltam S.Bust ezért arról nem tudok nyiltakozni.
A lényeg, hogy a Taranisba épített belső XJT modul és a vevő firmware-ének egyeznie kell, EU vs. nem-EU tekintetben. A Te vevőd szinte biztosan non-EU, tehát vagy azt frissíted a vevőt EU firmware-re vagy a Taranis belső XJT modulját kell non-EU-ra átírni (ehhez pedig valószínűleg a Taranis firmware-ét is le kell cseérlni non-EU-ra). A vevő smart porton keresztüli firssítése csak OpenTX 2.1.x Tararnis firmware-rel megy (a gyári EU talán 2.0.92, vagy valami ilyesmi), ezért nem sikerült neked.
Én egyébként ez a kicsit bonyolultabb utat jártam: Taranis Firmware frissítés OpenTX 2.1.legújabb verzióra, majd annak segítségével már SD kártyáról a belső XJT modult is megflasheltem non-EU fimware-rel. Ez esetben a vevőhöz nem kell nyúlni. Viszont, ha a Taranisodon már vannak modellek bekonfigurálva, akkor azok konfigurációi nem fognak egy az egyben átmenni az új verzióra (főleg a Telemetria nem), ezért ezt is kalkuláld bele.
A CC3D-vel nem haszáltam S.Bust ezért arról nem tudok nyiltakozni.
ZsoleszFPV
2016.01.01 23:34:16
@Tyron hun: Igazán nincs mit. Ez a kérdés elég sokszor felmerül mostanában. Azt hiszem megér majd egy külön blogbejegyzést. Neked is Boldog Újévet!
Ez úton szeretném felhívni a kedves olvasóim figyelmét, hogy brand egységesítés miatt hamarosan meg fog változni a blogom URL-e (webcíme)
Az új URL
zsoleszfpv.blog.hu
lesz.
A változás várhatóan január 5.-étől lép életbe. Az estleges kellemetlenségekért elnézéseteket…..

Amikor az Alien építésére észültem és a közismerten (és időközben bizonyítottan) lobbanékony Kiss 18A ESC-k mellett döntöttem, sokan ajánlották a figyelmembe az RC Groups forum egyik szálát, ahol a srácok egy "filléres" áram-korlátozó, vagy másnéven "füstgátló"…..

Ez a sport (mert azt gondolom, most már nyugodtan beszélhetünk sportról, hobbi helyett, még akkor is, ha sokunknak ez inkább csak hobbi marad), nem fejlődne ilyen ütemben néhány őrült, végletekig elkötelezett pilóta nélkül, akik az életük fő prioritásává tették az FPV…..
Belépve többet láthatsz. Itt beléphetsz