Adatok
dralisz82
25 bejegyzést írt és 3 hozzászólása volt az általa látogatott blogokban.

Az előző részben bemutatottam az aktív fékezést. Időközben egy ultrahangos távolságérzékelő/szonár is felkerült az autó elejére, így most arról lesz szó, hogy hogyan is gyúrhatjuk össze ezt a két funkcionalitást egy vészfékaszisztensé. A motiváció már adott egy ideje, hogy ezt a funciót…..

Ebben a részben a már jól működő odometriára építve valósítok meg egy nagyon egyszerű aktív fékezést végrehajtó algoritmust. Ahogy az alcím is sugallja, arra törekedtem, hogy minél egyszerűbben belehekkeljek a motorvezérlő ciklusba...

Ahogy arra a legutóbbi bejegyzésben már utaltam, a mágnesek számát növelni kellett ahhoz, hogy normális enkóderünk legyen. Normális alatt közel 50%-os pulzusszélességet értek, azaz az érzékelők ugyanannyi fokos elforgatáson keresztül érzékeljenek alacsony és magas állapotot. Mint kiderült, ehhez a…..

Régóta tervezem ezt a fejlesztést, mert mérföldkőnek gondolom a távirányítós autóból robottá válás útján. Eddig nem volt lehetséges, hogy az autó saját magát navigálni tudja, mivel semmilyen módon nem érzékelte a környezetét, a fizikai világgal való interakcióit. Az autót játékból vezető gyerekek…..

Az eredeti motorvezérlő már a végét járta, így amikor legutóbb szétszedtem az autót, azt is kicseréltem. Az eredeti H-hidat alkotó BJT tranzisztorok (pl. BD136, de mind a négy különböző volt!), valamint az ezeket vezérlő két tranzisztor sem teljesítette már az eredeti specifikációkat...

Amióta szervós a kormány, a fellépések alkalmával feltűnt egy furcsa jelenség: egy idő után az autó elkezdett "jobbra húzni", mégpedig annyira, hogy teljesen "balra tekert" kormánnyal ment egyenesen, jobbra pedig csak a mechanikai korlátok nem engedték a végálláson túlra. Idővel a jelenség eltűnt,…..
Az előző posztban létrehoztam egy, az akku feszültségének mérésére használható szenzort. Nézzük, hogyan és mire is lesz ez használható azon túl, hogy a távirányítóról lekérdezhető az értéke...
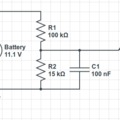
A Freedom Boardon van 6 db analóg bemenet, az akkumulátor monitorozását mindenképp terveztem, így adta magát, hogy feszültségmonitorozó legyen az első szenzor.
A legegyszerűbb szenzor egy analóg vagy digitális bemenet állapotának lekérdezése, azonban a szenzorkezelést nem érdemes ad-hoc módon…..
A legutóbbi poszban említettem, hogy lett egy kis gond a kormánymű vezérlésével. A kiégett tranzisztort cseréltem egy hasonlóra, majd futottam néhány kört, de nem lett már igazán jó. Ami azt illeti eleve nem volt egy jó konstrukció a H-híddal meghajtott kis motor, pozícióérzékelés nélkül. Így…..

Az előző részben elkészült a főkapcsoló, most pedig a DC/DC konvertereket hordozó NYÁK bekötését mutatom be...

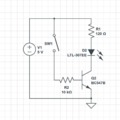
Ahogy ígértem, a sok szoftveres írás után foglalkozom újra a hardverrel. Két területet szeretnék jelenleg fejleszteni: A lámpák tranzisztorait, ill. csatlakozóit szeretném egy nekik dedikált NYÁK-ra áttenni, hogy helyet csináljak a breadboardon a következő fejlesztésekhez, valamint az autó…..

37 évvel ezelőtt a NASA háza táján már nagyban készülődtek a balsorsú Columbia első kilövésére, amikor egy veszélytelenként számon tartott anyag szörnyű balesetet okozott... A baleset dilettáns kezelésénél már csak a NASA azt követő arroganciája a megdöbbentőbb. Nem űrhajósok voltak az űrsikló első…..
dralisz82
2018.03.21 14:49:08
Áttérve az mbed OS 5-ös verziójára azonnal sínre került a soros portos kommunikációért és a parancsok feldolgozásáért felelős programmodul fejlesztése. Ebben a posztban bemutatom, hogy hol volt az áttörés kulcsa, milyen módon és miért úgy valósítottam meg ezt a részt.
Az eredmény egy olyan…..
A kezdeti, összedobott program elég kaotikusnak tűnt, így átszerveztem egy picit.Külön osztályokba szerveztem a hajtásvezérlést, a lámpák kezelését, szenzorokat, stb. Minden osztályt egy .cpp és egy hozzá tartozó header fájlban implementáltam.Ez a rész nem is okozott gondot, de a parancsértelmező…..
Régi adósságom az autó fedélzeti számítógépén futó szoftverről írni. Ezt most pótolom, a legelső, összedobott szoftver ismertetésével, annak apróbb hibáival, korlátaival együtt, hogy ezúttal is tudjunk miből tanulni...

Lezajlott pénteken a Kutatók Éjszakája, és szerencsére nem sokat pihenhettem a standnál. Az egyéb apróbb demonstrációs eszközeim (mint például TI LaunchPad, MKII Educational valamint CC2650 BLE BoosterPack, egy IBT-4 motorvezérlővel és egy kis 3D nyomtatott ventillátorral kiegészítve (melyet egy…..
Tegnap csak félig volt időm összerakni az autót, így most folytatom.
A Freedom boardról érdemes tudni, hogy GPIO lábanként maximum 25 mA-rel, összesen maximum 100 mA-rel terhelhetjük. Ezt, és további lényeges specifikációkat a kártyán található mikrovezérlő adatlapjából tudhatunk meg.
Mivel egy…..

Végre megérkezett a lézervágott alaplemez, így összeépíthettem az autót. Addig sem tétlenkedtem, például készre szereltem a lámpákat és dolgoztam a szoftveren, melyről egy külön posztban fogok írni.
Precíz munka, a méretek mindenhol hajszálpontosak, az élek pedig szabályosak:..

Amíg az alaplemez megérkezik, összeraktam a lámpatesteket és méretre vágtam a kábelkötegeiket. Az első lámpatestekhez 4-4, a hátsókhoz 5-5 ér megy. Ezeket a kötegeket szeretném ízlésesen elvezetni, ne csak úgy lógjanak össze-vissza. Ha csak simán összesodornám az ereket, az előbb-utóbb szétjönne.…..
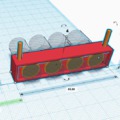
Ahogyan azt már korábban említettem, az elektronikát és későbbi bővítményeket hordozó alaplemezt egy munkatársam révén lézervágással van lehetőségem kivitelezni. Ehhez vektorgrafikus formában kell átadni a terveket. A tervezést a már bevált TinkerCAD-ben folytatom, aminek a legfőbb előnye, hogy a…..

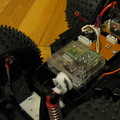
Időközben elkészítettem a breakout kártyát, ami a régi, hibás vezérlő helyére kerül, és amin keresztül irányítom majd az autót...

Térjünk vissza kicsit a Freedom boardhoz és az ARM mbed környezetéhez.
Az mbed környezet azzal teszi roppant egyszerűvé a beágyazott rerndszerek programozását, hogy rengeteg előre megírt C++ osztályt kínál, melyek segítségével absztrakt módon kezelhetünk perifériákat, szolgáltatásokat, de olyan…..

A 3D nyomtatóknak sok fajtája létezik. A legegyszerűbb (egyben legrégibb) módszer az úgynevezett Fused Deposition Modeling - röviden FDM - már a '80-as évek végén megszületett. Az FFF rövidítést is használják erre a módszerre, ahogy a hivatkozott Wikipedia cikk is írja.
Egy ezen az elven működő…..

Felmerült, hogy Kutatók Éjszakáján csinálhatnánk egy közös standot munkatársaimmal, ahol az érdeklődőkkel (elsősorban gyerekekre számítunk) közösen építenénk egyszerűbb áramköröket, készítenénk egyszerűbb példaprogramokat mikrovezérlőkre. Ennek kapcsán egyik munkatársamtól kaptam egy ARM Cortex-M…..

Legutóbb az elektronikával foglalkoztam, most a mechanikus részeken volt kedvem gondolkozni.Az új vezérlőegység és további műszerek, érzékelők elhelyezéséhez szükség lesz egy szerelőlapra. Az autó szerencsére jó nagy, így nagy felületet lehet kialakítani a hátán.A gyári kasztnit tartó 4 db rögzítési…..
Belépve többet láthatsz. Itt beléphetsz
A munkások nem az űrrepülőben jártak szerencsétlenül (ott nincsenek is ekkora terek), hanem a mobil indítóállás belsejében.